ROS 2
BeamNG-ROS 2 bridge
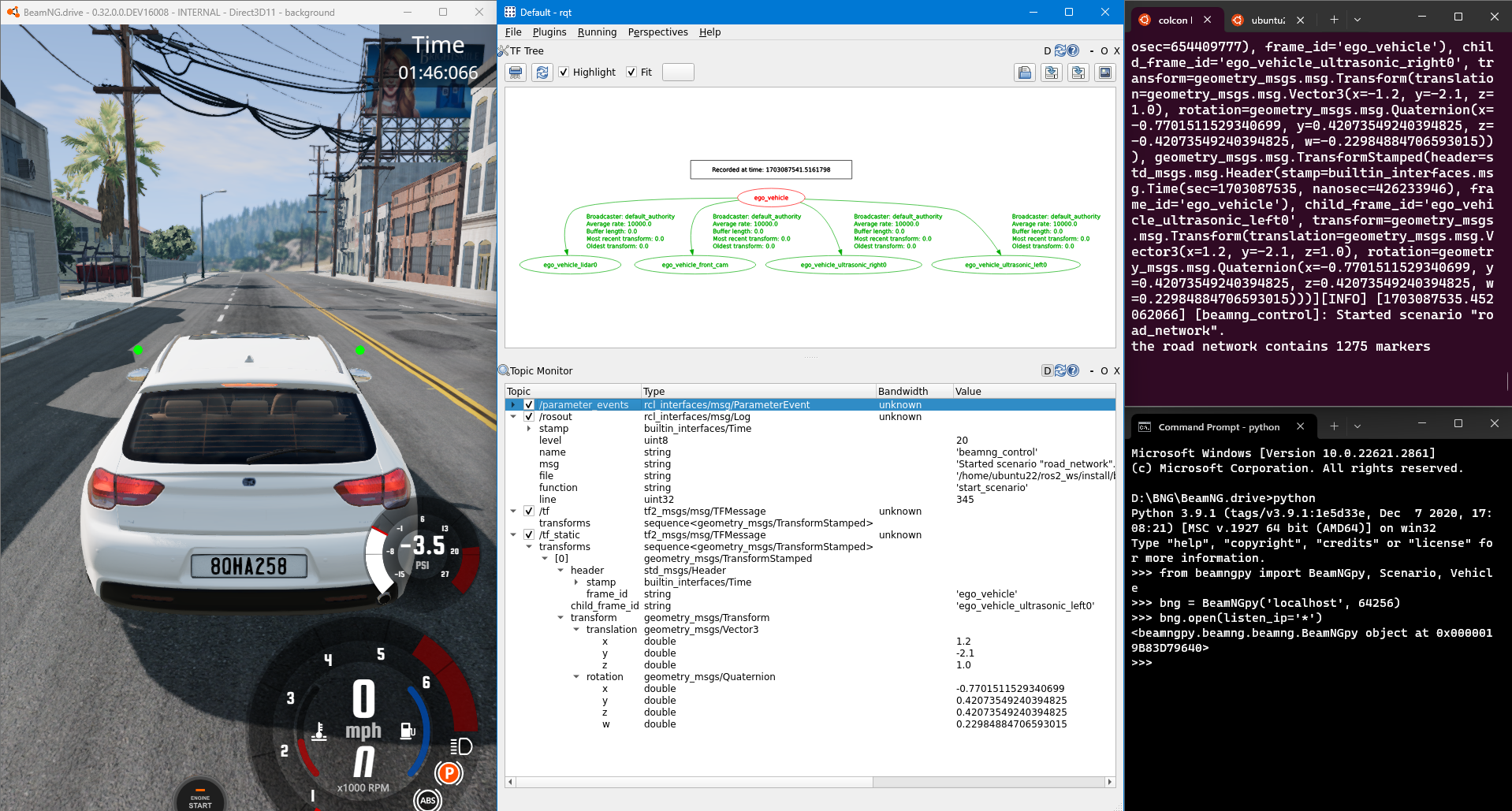
The BeamNG - ROS 2 repository serves the interoperability between BeamNG.tech and ROS2 distribution humble hawksbill .
Basic ROS 2 functionality supports one package for the remote control of the simulation platform and custom messages package.
ROS 2 packages
- beamng_ros2: ROS2 bridge for the BeamNG.tech simulation platform, and loading the ROS2-BeamNG.tech bridge and the scenario details (level, weather, day time, and vehicle configuration, such as position, sensors, etc.)
- beamng_agent: for the control of a driving agent used for teloep movement of the
beamng_teleop_keyboardpackage, also used for enable/disable keyboard remote control to the BeamNG.tech simulation platform. - beamng_teleop_keyboard: keyboard remote control of the BeamNG.tech simulation platform through ROS2 bridge.
- beamng_msgs: defined the custom messages of the BeamNG.tech simulator to be readable by ROS2-standards.
To get started, read the Documentation . To see the source code, check the Repository .
Last modified:
April 15, 2025
Was this article helpful?
