Overview
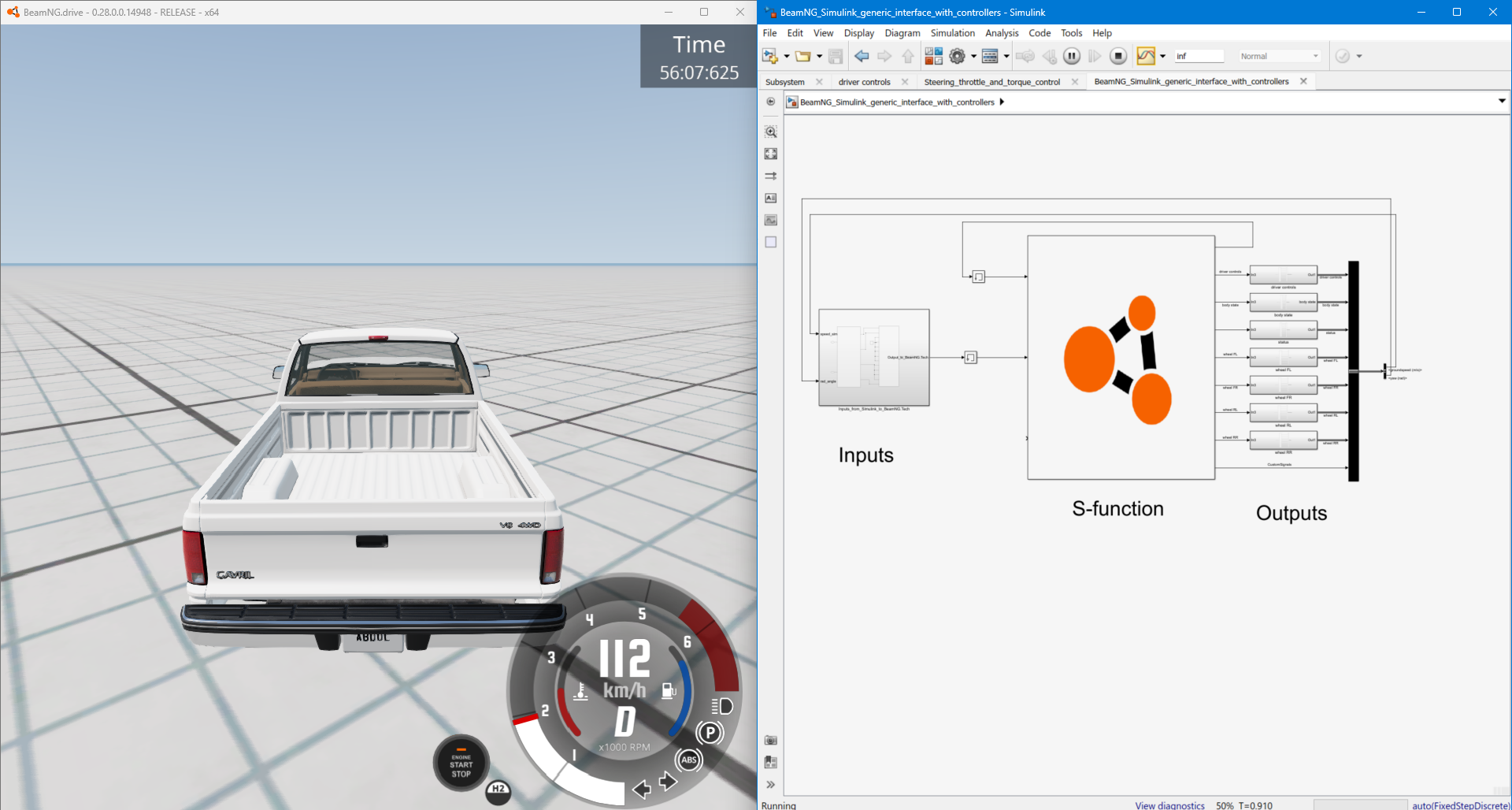
We are excited to announce that the highly requested feature of interfacing BeamNG.Tech in Simulink is here. The purpose of this document is to provide details/instructions on how to use the BeamNG Simulink Vehicle Systems Interface. The user can connect the BeamNG simulator with a specially designed Simulink S-function , which will allow management of a tightly coupled two-way communication between these two environments. The major focus here is on allowing native Simulink code to control and query a vehicle in BeamNG. This includes various powertrain properties, including wheel torques (both drive and brake), or pedal inputs.
The code is available at: https://github.com/BeamNG/BeamNG-Simulink_generic_interface
 BeamNG-Simulink generic interface
BeamNG-Simulink generic interface
Compatibility
Running the BeamNG-Simulink generic interface requires three individual software components, here is a list of compatible versions.
| BeamNG.tech | BeamNG-Simulink generic interface | MATLAB & Simulink |
|---|---|---|
| 0.28 | 0.1.0 | R2018 & later |
