BeamNG - CAN-Bus integration
The CAN-Bus integration lets you connect the simulation to a real network of CAN devices and enables bidirectional communication between
the vehicle lua and the hardware.
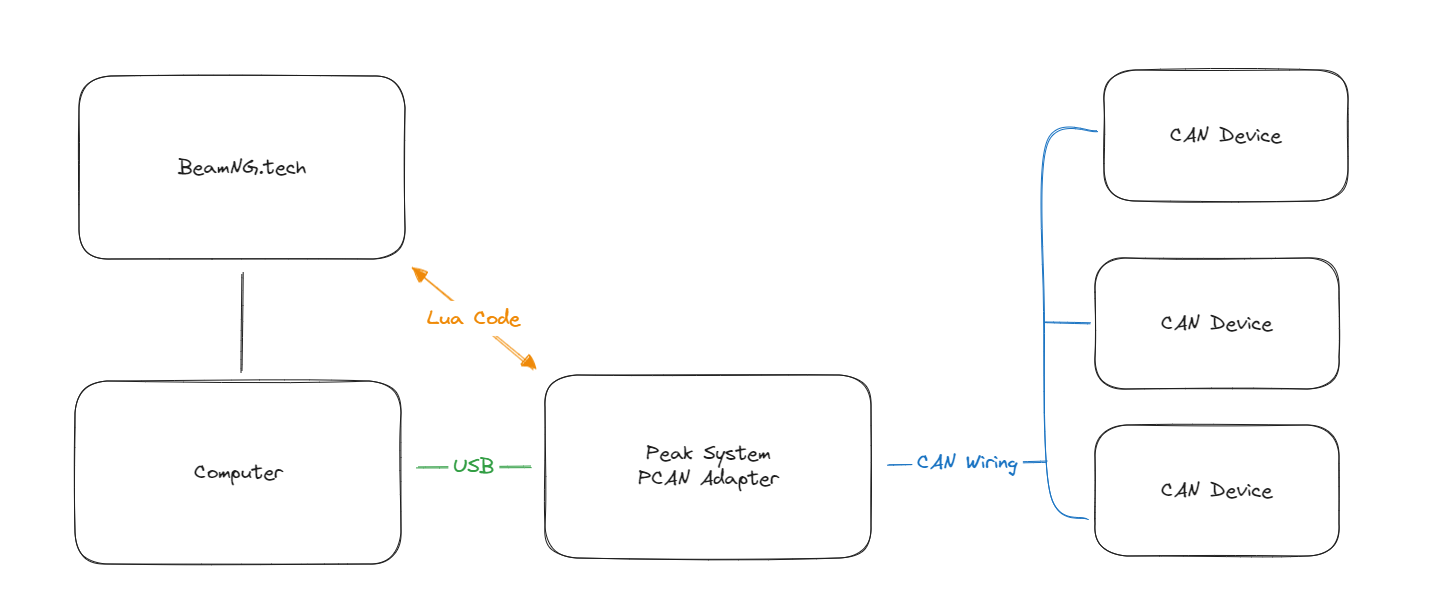 CAN-Bus diagram
CAN-Bus diagram
To make a working setup the following minimum components are required:
- BeamNG.tech software, v0.30 or later version;
- PEAK System CAN-Interface (we tested with the PCAN-USB models, other models should be usable with additional work);
- A working CAN network with proper termination and wiring.
To get started with the software side of things, take a look at lua extension and its exposed methods in \lua\vehicle\extensions\tech\CANBus\CANBusPeak.lua.
Given the unique nature of CAN setups and required software support, we do not provide pre-made support for specific CAN devices. Instead, one will need to write the supporting code in vehicle lua themselves.
For an example of communication with a race car dashboard, take a look at \lua\vehicle\extensions\tech\CANBus\RacingDisplay.lua.
