BeamNG-ROS bridge needs to be configured to contain the correct IPv4 address of the machine hosting the simulation.
Using it will start up a node that connects to the simulation and starts up a scenario as defined in the beamng_control/config/scenario/{scenario}.json. Other scenario specifications are available in the same directory.
- Scenarios are defined through JSON objects, here is a list of possible keys and values.
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"version" |
String | BeamnG ROS Integration version, f.ex. 1 |
Mandatory |
"level" |
String | BeamNG.tech level name, f.ex. "west_coast_usa". |
Mandatory |
"mode" |
String | Value | Optional |
"vehicles" |
Array | At least one vehicle needs to be specified in order to obtain a valid scenario. | Mandatory |
| See the table below for the Specification. | |||
"name" |
String | Name of the level. | Mandatory |
"time_of_day" |
Float | Value between 0 and 1 where the range [0, .5] corresponds |
Optional |
to the times between 12 a.m. and 12 p.m. and [.5], 1] corresponds to |
|||
| the time range between 12 p.m. and 12 a.m. | |||
"weather_presets" |
String | Weather presets are level specific, ToDo | Optional |
- Vehicles are also defined as JSON objectsin
beamng_control/config/vehicles/{vehicle}.json.
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"name" |
String | Name of the vehicle, used for identification | Mandatory |
"model" |
String | Name of the vehicle type, f.ex. etk800 |
Mandatory |
"position" |
Array | Array of 3 floats, specifying the x, y, and x position of the vehicle. |
Mandatory |
"rotation" |
Array | Array of 4 floats, specifying the vehicle rotation quaternion. | Mandatory |
"sensors" |
Array | Array of JSON objects, specifying the vehicles sensor parameters. | Optional |
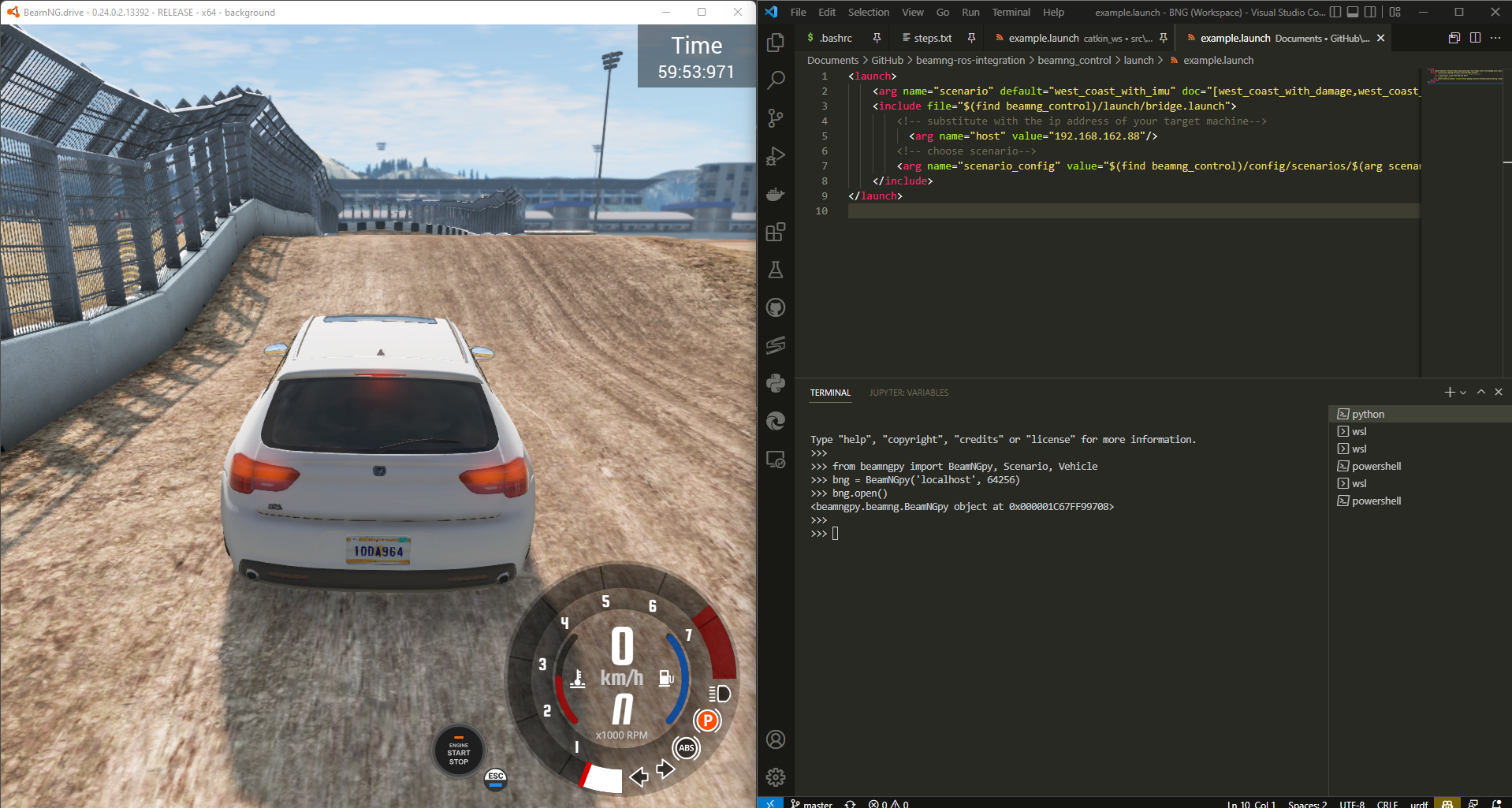
Running BeamNG.Tech
After installing BemaNGpy , and setup BeamNG.Tech, you can run BeamNG.py from the Powershell as shown in the picture below.
Running the ROS-bridge
- Loading beamng_control node for loading the scenarios components i.e., level, vehicle, environemnt and sensors from
example.launchfile in thebeamng_controlpackage through the command:
roslaunch beamng_control example.launch
Running beamng_agent
- Loading beamng_agent node for enabling the control from ROS side:
roslaunch beamng_agent example.launch
The folloing topics for move/stop the vehicle in simulation and enable/disable keybard control from the simulation side:
- Driving:
rostopic pub --once control beamng_msgs/VehicleControl 0 1 0 0 0 1
- Stopping:
rostopic pub --once control beamng_msgs/VehicleControl 0 0 1 0 0 1
- Release:
rostopic pub --once control beamng_msgs/VehicleControl 0 0 0 0 0 1
Calling ROS-services for controlling the Simulation
Various services to control the state of the simulation are available.
| Name | Type | Purpose |
|---|---|---|
/beamng_control/pause |
bng_msgs.srv.ChangeSmulationState |
Pause the simulation. |
/beamng_control/resume |
bng_msgs.srv.ChangeSmulationState |
Resume the simulation. |
- Disable user keybaod and mouse control of the BeamNG.Tech game:
rosservice call /beamng_control/pause "{}"
- terminal feedback should be:
success: True
- Enable user keybaod and mouse control of the BeamNG.Tech game:
rosservice call /beamng_control/resume "{}"
- terminal feedback should be:
success: True
Vehicle Creation and Control
| Name | Type | Purpose |
|---|---|---|
/beamng_control/get_scenario_state |
bng_msgs.srv.GetScenarioState |
Determining the current state of the scenario. |
/beamng_control/spawn_vehicle |
beamng_msgs.srv.SpawnVehicle |
Spawn new vehicle. |
/beamng_control/teleport_vehicle |
beamng_msgs.srv.TeleportVehicle |
Teleport vehicle. |
/beamng_control/start_scenario |
bng_msgs.srv.StartScenario |
Starting a loaded scenario. |
/beamng_control/get_current_vehicles |
beamng_msgs.srv.GetCurrentVehiclesInfo |
Get the spawned vehicle information. |
- Clone a new vehicle :
rosservice call /beamng_control/spawn_vehicle 'ros' [0,5,10] [0,0,0,1] "/config/vehicles/etk800.json"
- Laod a new scenario:
rosservice call /beamng_control/start_scenario "/config/scenarios/west_coast.json"
- Reposition the current vehicle in west coast:
rosservice call /beamng_control/teleport_vehicle "ego_vehicle" [568.908,13.422,148.565] [0,0,0,1]
- Getting the scenario state:
rosservice call /beamng_control/get_scenario_state
- Getting the get_current_vehicles:
rosservice call /beamng_control/get_current_vehicles
- Getting the get_loggers:
rosservice call /beamng_control/get_loggers
Note:
- if you got a feedback
success: Falseforresumeorpauseservices, that means yourbeamng_agentnode isn’t active, and you will getting the following error message in the terminal ofbeamng_controlnode:
List of ROS-topics
- ROS-visualization tool (Rviz) map:
/beamng_control/<vehicle_id>/marker
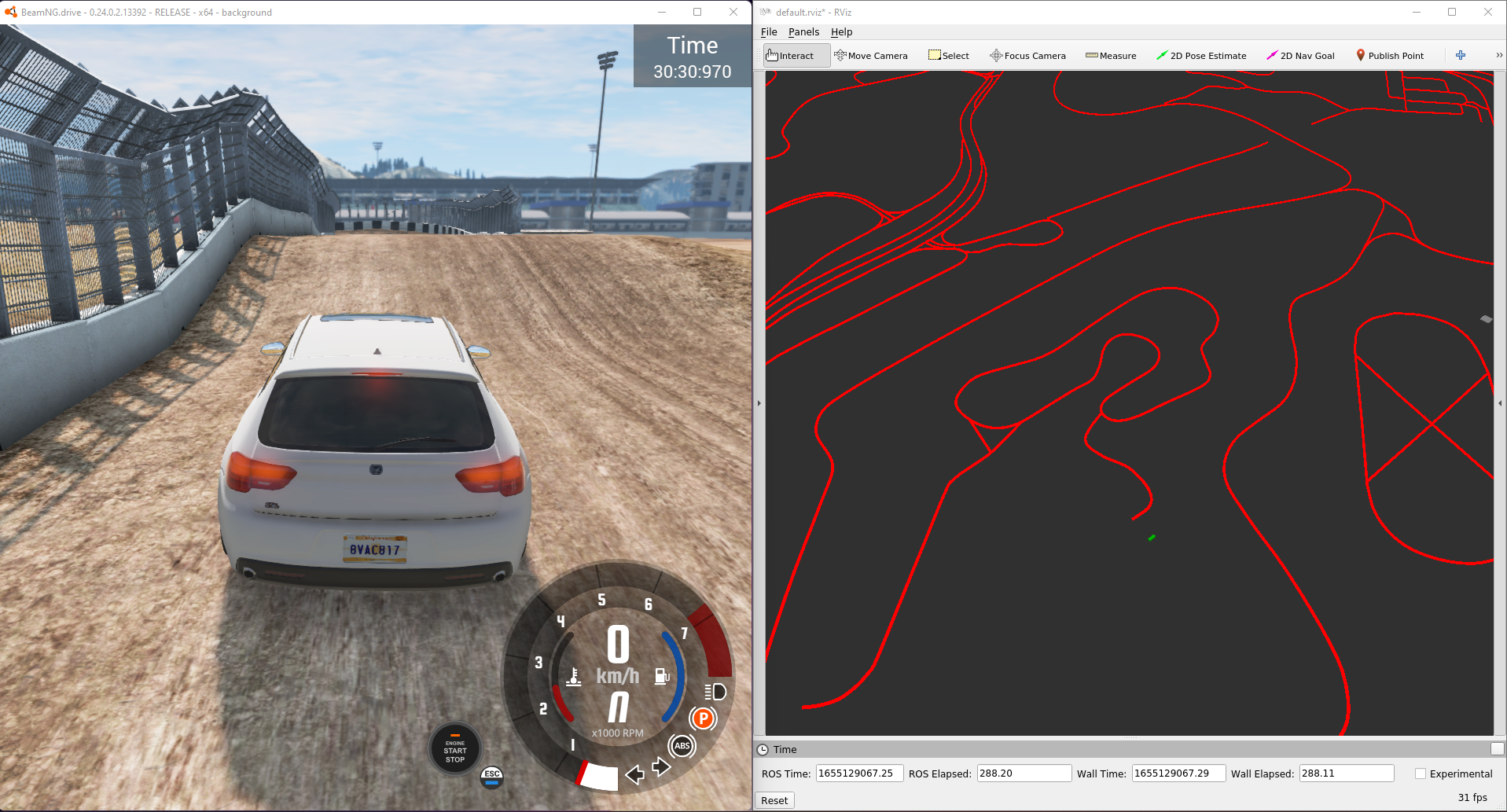 Rviz Map of road network West Coast, USA
Rviz Map of road network West Coast, USA
- Camera:
Contrary to other sensors, the Camera sensor may publish to multiple topics. If the camera sensor is configured to collect color, depth, annotation, and instance data, it is published to the respective topics:
/beamng_control/<vehicle_id>/<camera_id>/color
/beamng_control/<vehicle_id>/<camera_id>/depth
/beamng_control/<vehicle_id>/<camera_id>/annotation
/beamng_control/<vehicle_id>/<camera_id>/instance
The message type for all topics is sensor_msgs.msg.Image.
Note that although the bounding_box option is given, this feature is still under development and will automatically be disabled.
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "Camera.default" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
"position" |
Array | Array of 3 floats, specifying the x, y, and x position of the sensor. |
Mandatory |
"orientation" |
Array | Array of 4 floats, specifying the vehicle rotation quaternion | Mandatory |
"resolution" |
Array | Tuple of ints, defining the x and y resolution of |
Optional |
| the resulting images. | |||
"fov" |
Integer | Camera field of view. | Optional |
"colour" |
Boolean | Dis-/Enables color image generation. | Optional |
"depth" |
Boolean | Dis-/Enables depth image generation. | Optional |
"annotation" |
Boolean | Dis-/Enables ground truth generation for object type annotation. | Optional |
"instance" |
Boolean | Dis-/Enables ground truth generation for instance annotation. | Optional |
"bounding_box" |
Boolean | This feature is not supoprted at the moment | Optional |
| and will be automatically disabled. |
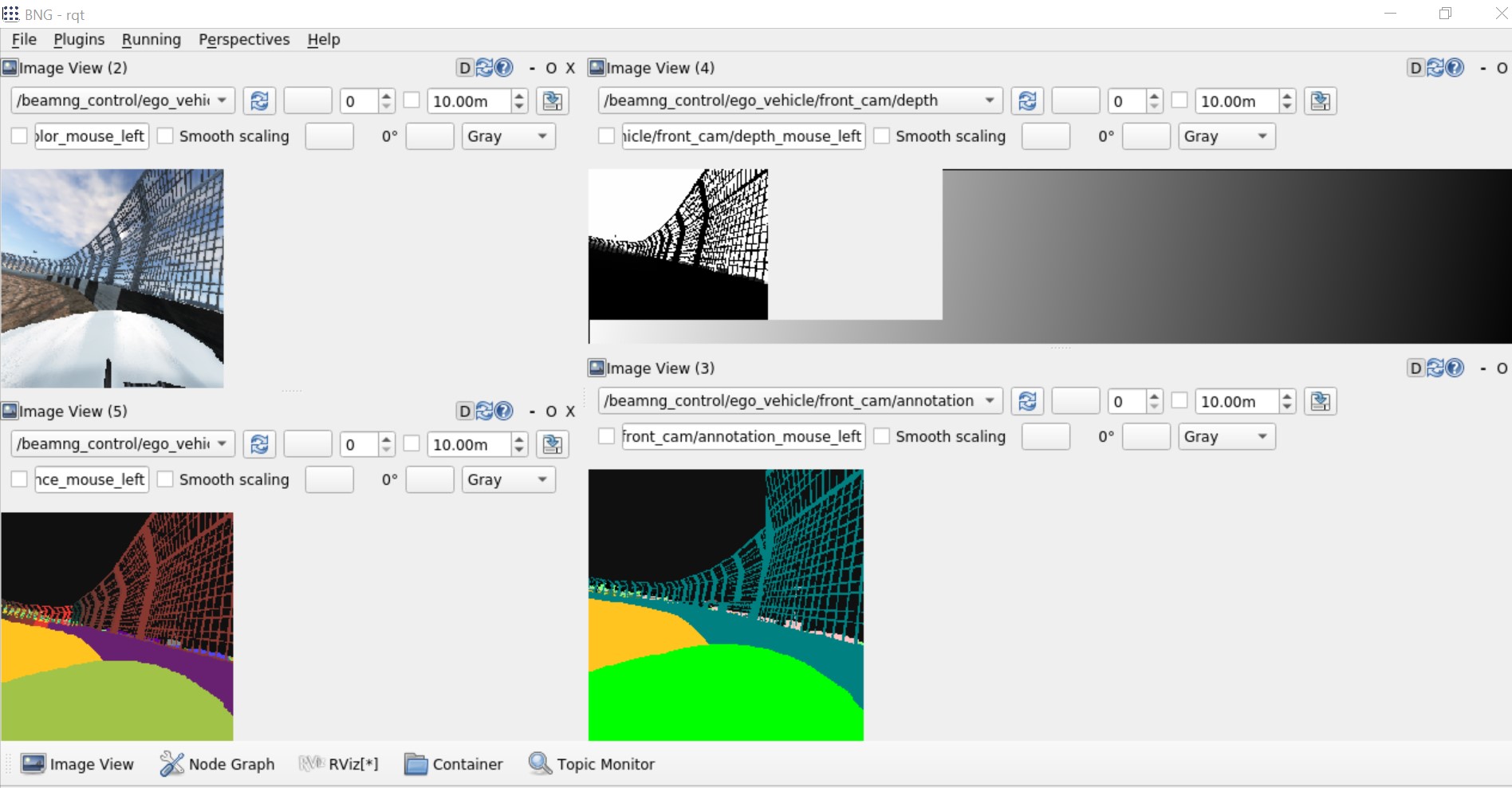 multiple camera filters rgb,depth,insthence,and annotation -starting from top-left to bottom-right
multiple camera filters rgb,depth,insthence,and annotation -starting from top-left to bottom-right
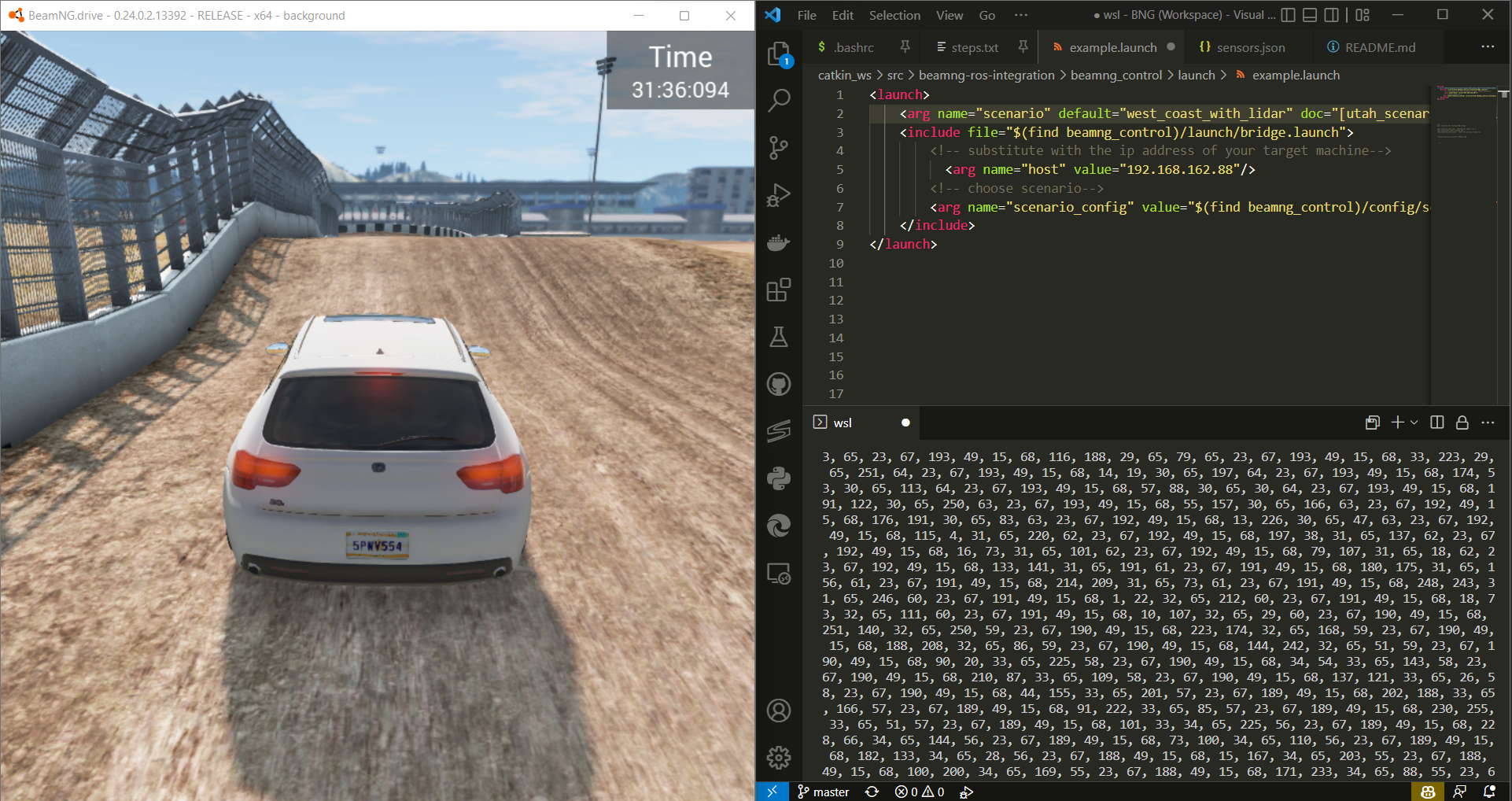
- LiDAR:
Message type: sensor_msgs.msg.PointCloud2
/beamng_control/<vehicle_id>/lidar0
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "Lidar.default" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
"position" |
Array | Array of 3 floats, specifying the x, y, and x position of the sensor. |
Mandatory |
"vertical_resolution" |
Integer | Vertical resolution, i.e. how many lines are sampled vertically | Optional |
"vertical_angle" |
Float | The vertical LiDAR sensor angle, in degrees. | Optional |
"hz" |
Integer | The refresh rate of the LiDAR sensor, in Hz. | Optional |
"rps" |
Integer | The rays per second emmited by the LiDAR sensor | Optional |
"angle" |
Integer | horizontal range resolution, i.e. how many degrees are sampled horizontally | Optional |
"max_distance" |
Integer | Maximal distance for data collection. | Optional |
"visualized" |
Integer | Dis-/Enable in-simulation LiDAR visualization. | Optional |
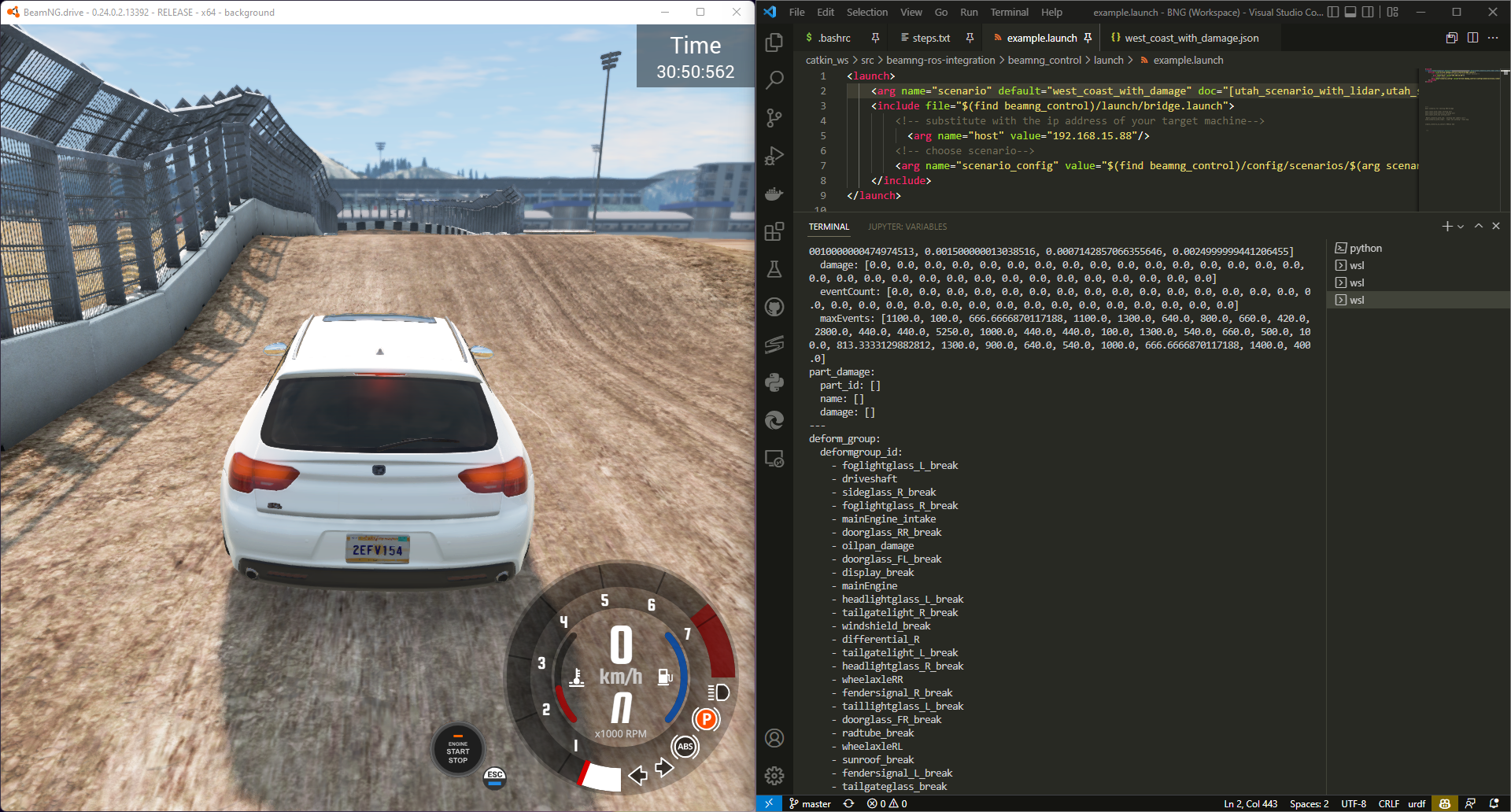
- Damage:
Message type: beamng_msgs.msg.DamagSensor
/beamng_control/<vehicle_id>/damage0
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "Damage" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
- time:
Message type: beamng_msgs.msg.TimeSensor
/beamng_control/<vehicle_id>/time0
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "Timer" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
- Gforces:
Message type: beamng_msgs.msg.GForceSensor
/beamng_control/<vehicle_id>/gforce0
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "GForces" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
- Electrics:
Message type: beamng_msgs.msg.ElectricsSensor
/beamng_control/<vehicle_id>/electrics0
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "Electrics" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
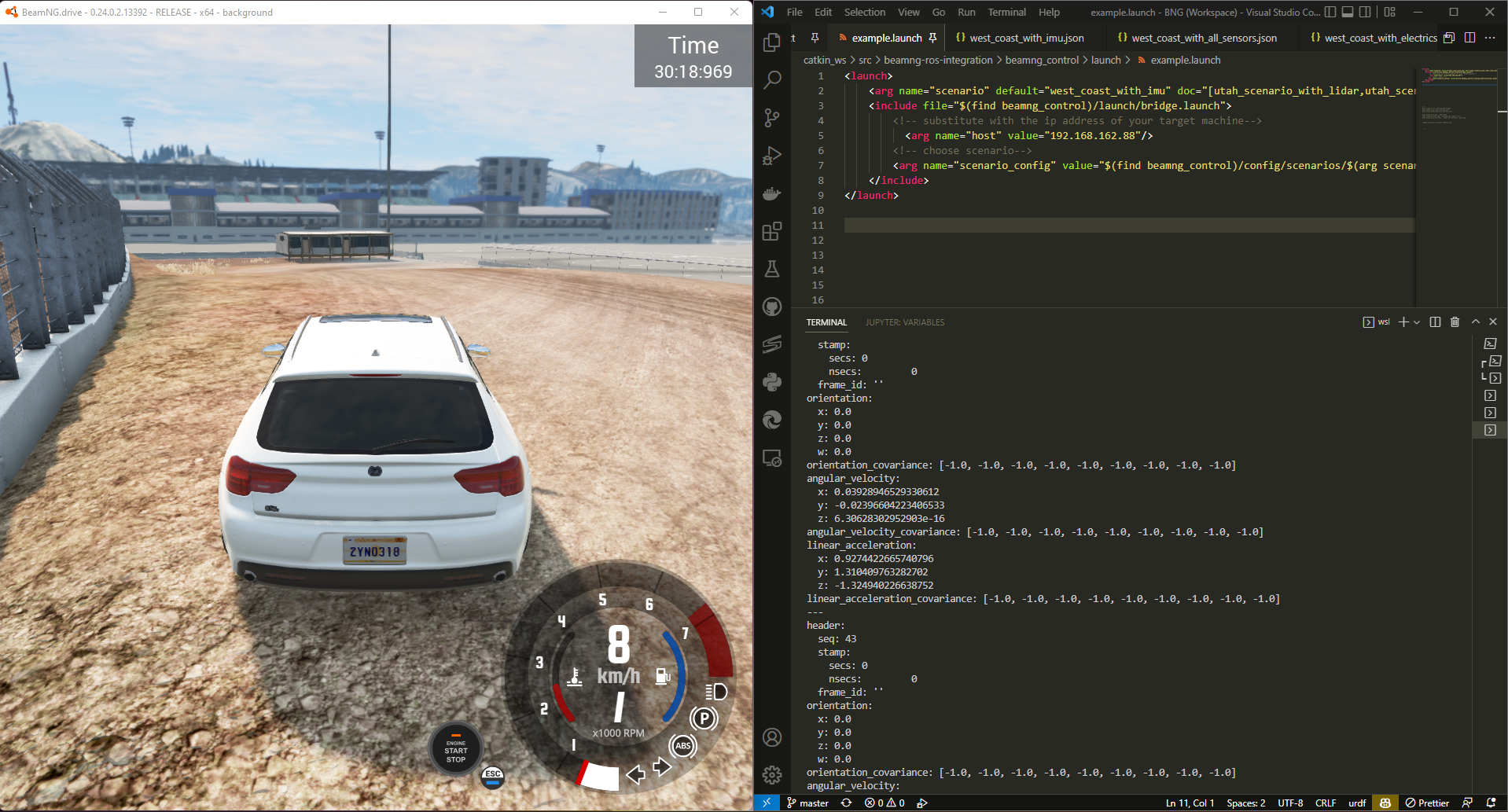
- Imu pose:
Message type: beamng_msgs.msg.DamagSensor
/beamng_control/<vehicle_id>/position_imu
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "IMU" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
"position" |
Array | Array of 3 floats, specifying the x, y, and x position of the sensor. |
Mandatory |
- Parking sensor (ultrasonic):
Message type: beamng_msgs.msg.USSensor
/beamng_control/<vehicle_id>/parking_sensor
| Key | Value Type | Value Specification | Entry Type |
|---|---|---|---|
"type" |
String | "Ultrasonic.smallrange",and/or "Ultrasonic.midrange",and/or "Ultrasonic.largerange" |
Mandatory |
"name" |
String | Unique sensor id. | Mandatory |
"position" |
Array | Array of 3 floats, specifying the x, y, and x position of the sensor. |
Mandatory |
"rotation" |
Array | Array of 3 floats, specifying the vehicle rotation quaternion | Mandatory |
"fov" |
Integer | ultrasonic sensor field of view. | Optional |
"colour" |
Integer | Dis-/Enables color image generation. | Optional |
"min_resolution" |
Integer | Minimum distance for data collection. | Optional |
"min_distance" |
Integer | Minimum range for data collection. | Optional |
"max_distance" |
Integer | Maximal range for data collection. | Optional |
- Vehicle state:
Message type:
beamng_msgs.msg.StateSensor
/beamng_control/<vehicle_id>/state
