ROS 2
BeamNG-ROS 2 bridge
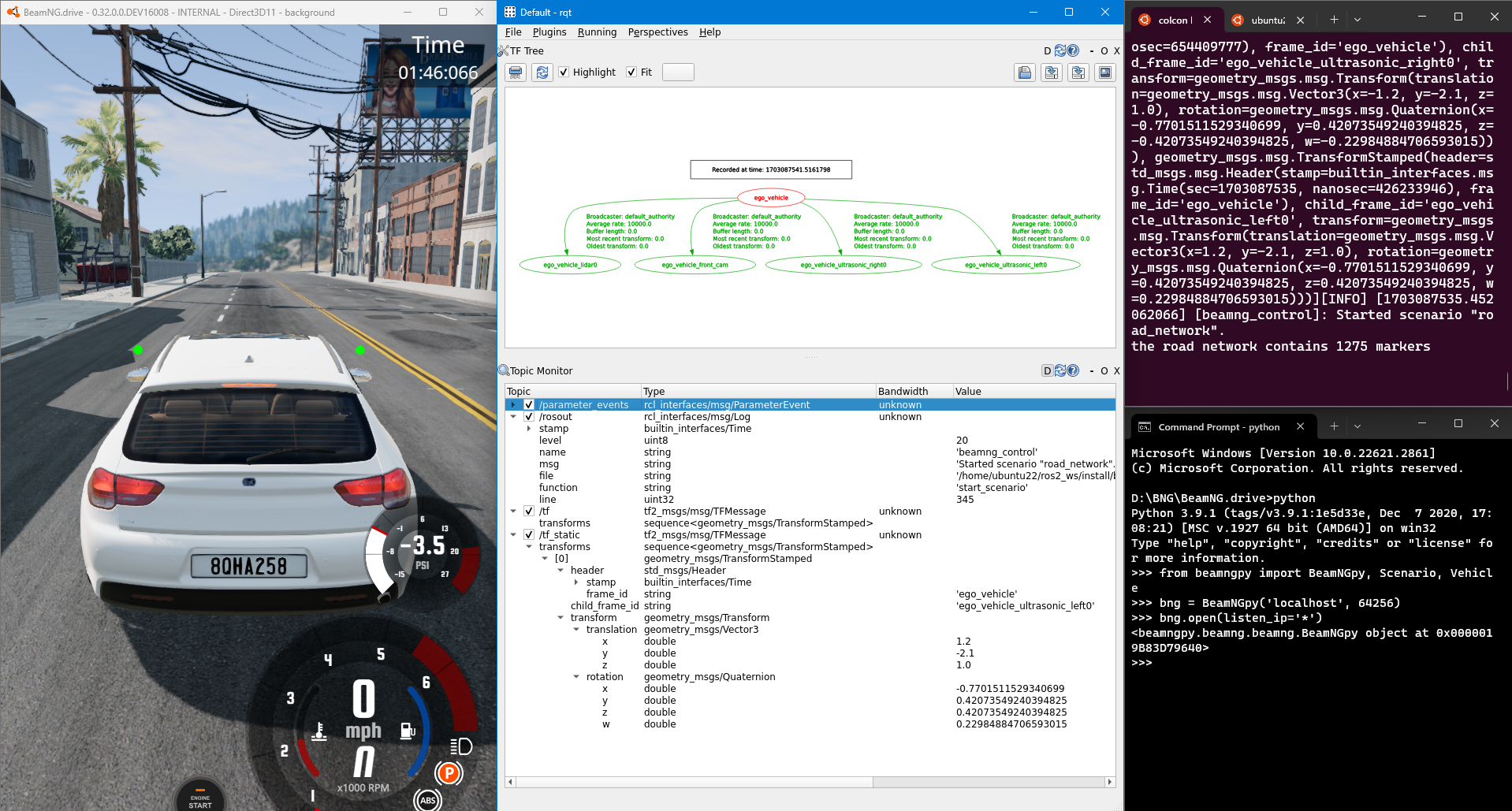
The BeamNG - ROS 2 repository serves the interoperability between BeamNG.tech and ROS2 distributions humble hawksbill .
Basic ROS 2 functionality supports one package for the remote control of the simulation platform and custom messages package.
ROS 2 packages
- beamng_control: loading the ROS2-BeamNG.tech bridge and the scenario details ( vehicle, environment, sensors, location, etc.)
- beamng_msgs: defind the custom messages of the BeamNG.tech simulator to be readable by ROS2-standards.
The code is available at: https://github.com/BeamNG/beamng-ros2-integration .
Last modified:
January 15, 2024
