Overview
What is this tool?
The Drive Path Editor provides a workspace for building, previewing, and editing AI driving routes. From the tool window, the user can add new path splines, import routes, and manage vehicle <-> path links. When vehicles and paths are linked, the user can execute playback and the vehicles attached to paths will proceed to drive along them. The tool supports free-form path drawing on any map and waypoint-constrained paths on maps which have navigation graphs.
Practical buttons, checkboxes, and sliders allow the user to control the driving behavior of each path. This includes driver aggressiveness, lane behavior, delayed starting, and velocity profile editing with the mouse.
In ‘Free Mode’, paths can be drawn and edited easily with the mouse. In ‘NavGraph Mode’, the tool renders the navigation graph and the user chooses waypoints to form a path, which can be edited later.
What you can create
Key concepts
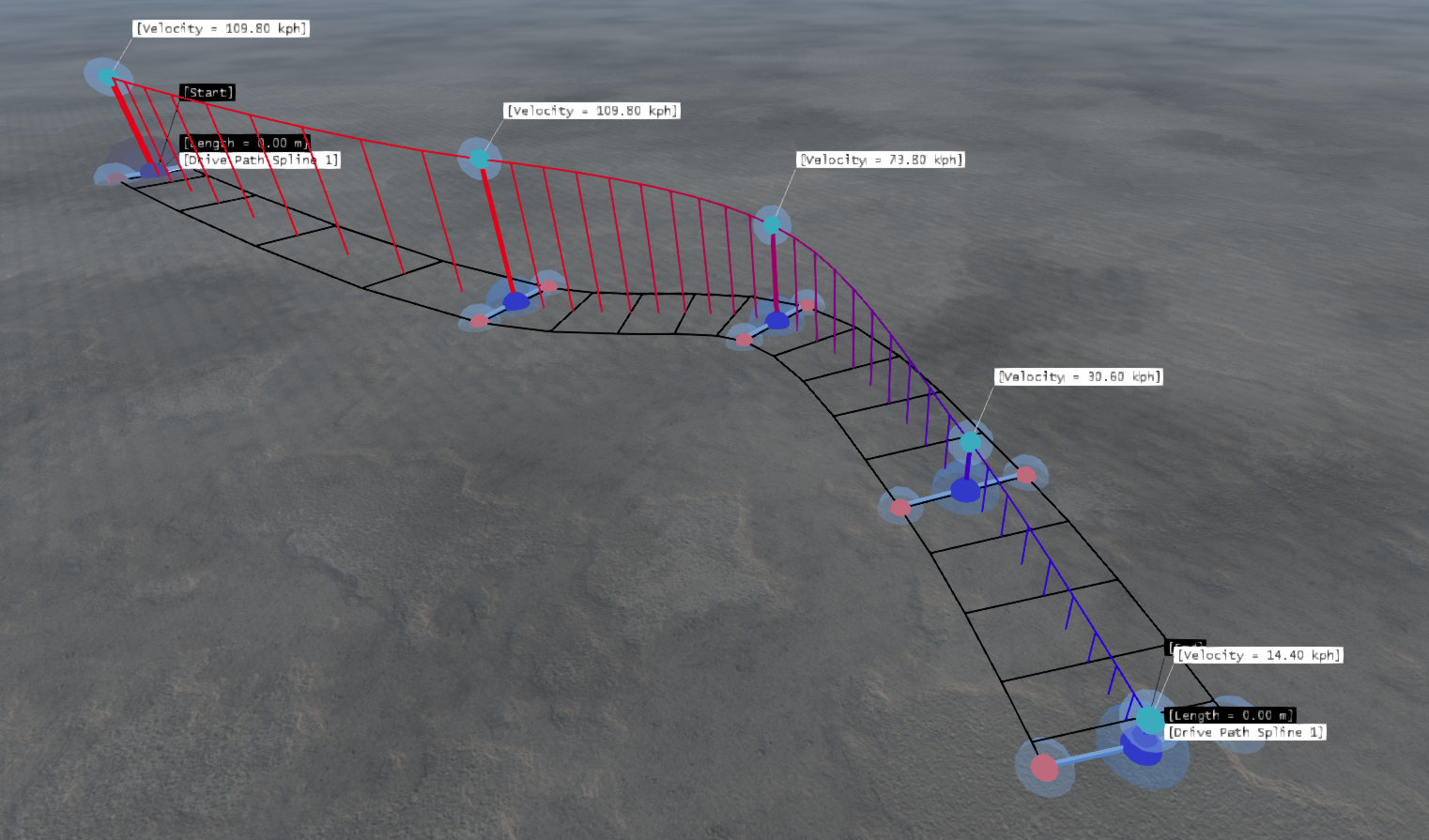
Splines: Paths which can be created and edited to define the route for AI driving routes and vehicle paths.
Nodes: Points along a spline which can be positioned and edited with the mouse, allowing precise control over the spline’s shape and path.
Rib Handles: Controls at each node (left and right sides) which can be dragged in and out with the mouse to control the width of the path.
Bar Handles: Vertical controls at each node which can be dragged up and down with the mouse to set the velocity along the spline or velocity limits for AI driving behavior.
Vehicle <-> Path Links: The connection between vehicles and path splines which enables AI driving. The user links a vehicle to a single path spline by selecting both the vehicle and the path, then establishing the connection. Once linked, the user can execute playback and the vehicle will drive along the path, allowing the user to test and preview the AI driving behavior.
Free Mode: A path creation method which allows free-form drawing on any map, giving the user complete control over where the path goes without any constraints.
NavGraph Mode: A path creation method which uses existing navigation data, where the tool renders the navigation graph and the user chooses waypoints to form a path for more structured route planning.
Velocity Profiles: Control over speed variations along the path for realistic AI driving simulation.
Driving Behavior: Control over driver aggressiveness, lane behavior, and delayed starting for realistic AI driving simulation.
Undo/Redo History: All adjustments are recorded to history for safe experimentation, allowing the user to try different settings and easily revert changes when needed.
Was this article helpful?
